
Showcase
FSI Student Design Projects cover a wide range of topics, disciplines and needs. Shared here are Reports, Papers, Posters, Other Products and the Teams.
Reports generally follow the FSI Capstone Format. The intent is synopsis of the project that will better enable sponsors, faculty and employers to understand the work performed and the capabilities of those involved. Papers, Posters and Other Products will likely be formatted as required for the target audiences.
-
2022 DON 4, Game Based Distributed Simulation Visualization Project
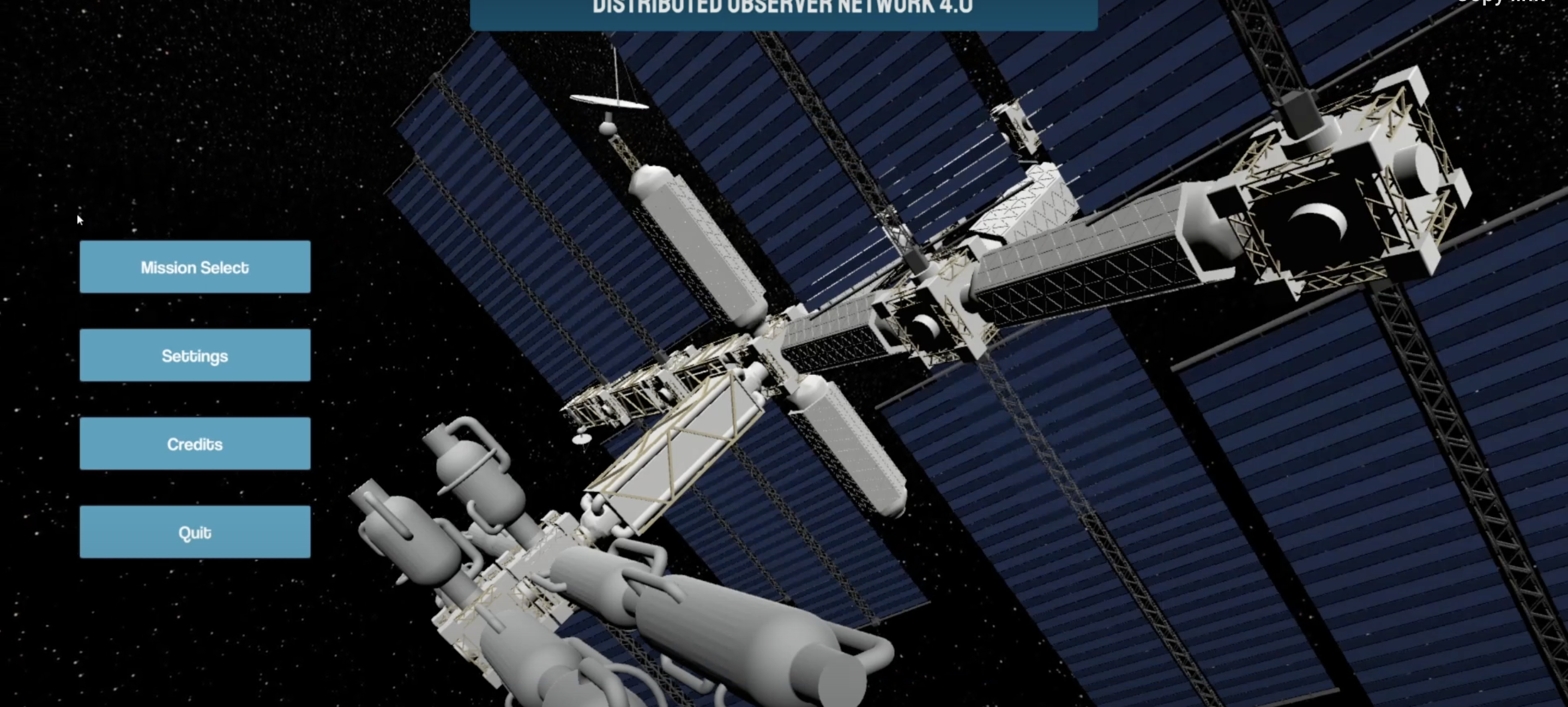
DON is the Distributed Observer Network. It is a game-based tool combining the analysis capabilities of NASA’s distributed simulation capabilities with interface standards (the MPC telemetry definition) and video game technologies to record and share 4D data associated with analysis activities.
-
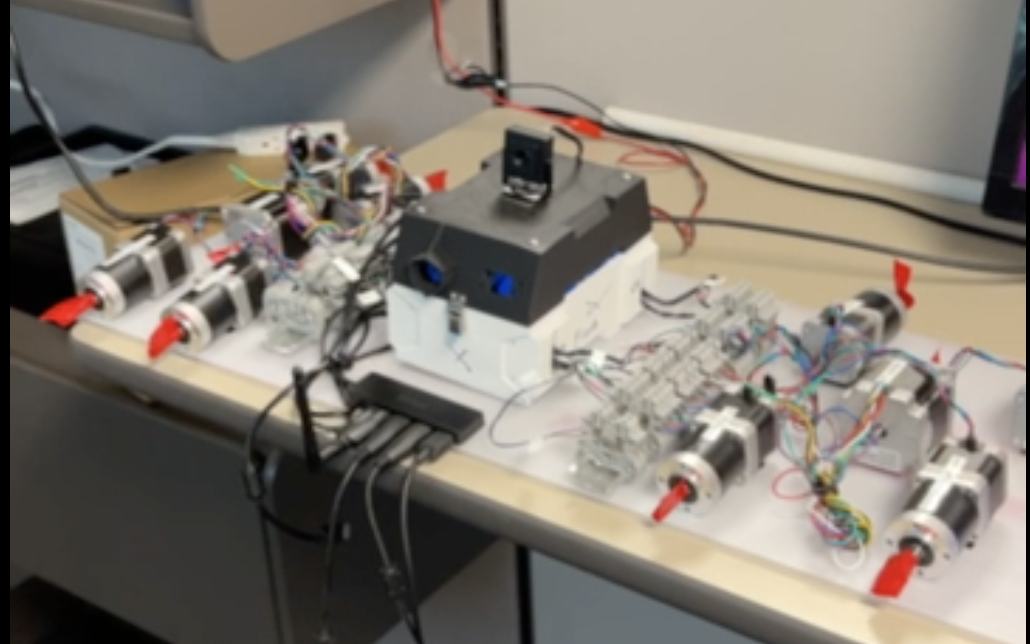
2022 Re-Rassor Shoulder
The RE-RASSOR Shoulder team focused on the creation of a viable replacement for the current, $1,000+, NASA mini-RASSOR component. Replacement of this joint enables the full RE-RASSOR excavator to be built without the need the high cost, steel components. The solution is a compound reduction gear driven by a NIMA 23 motor.
-
2022 RE-RASSOR Arm 1.0
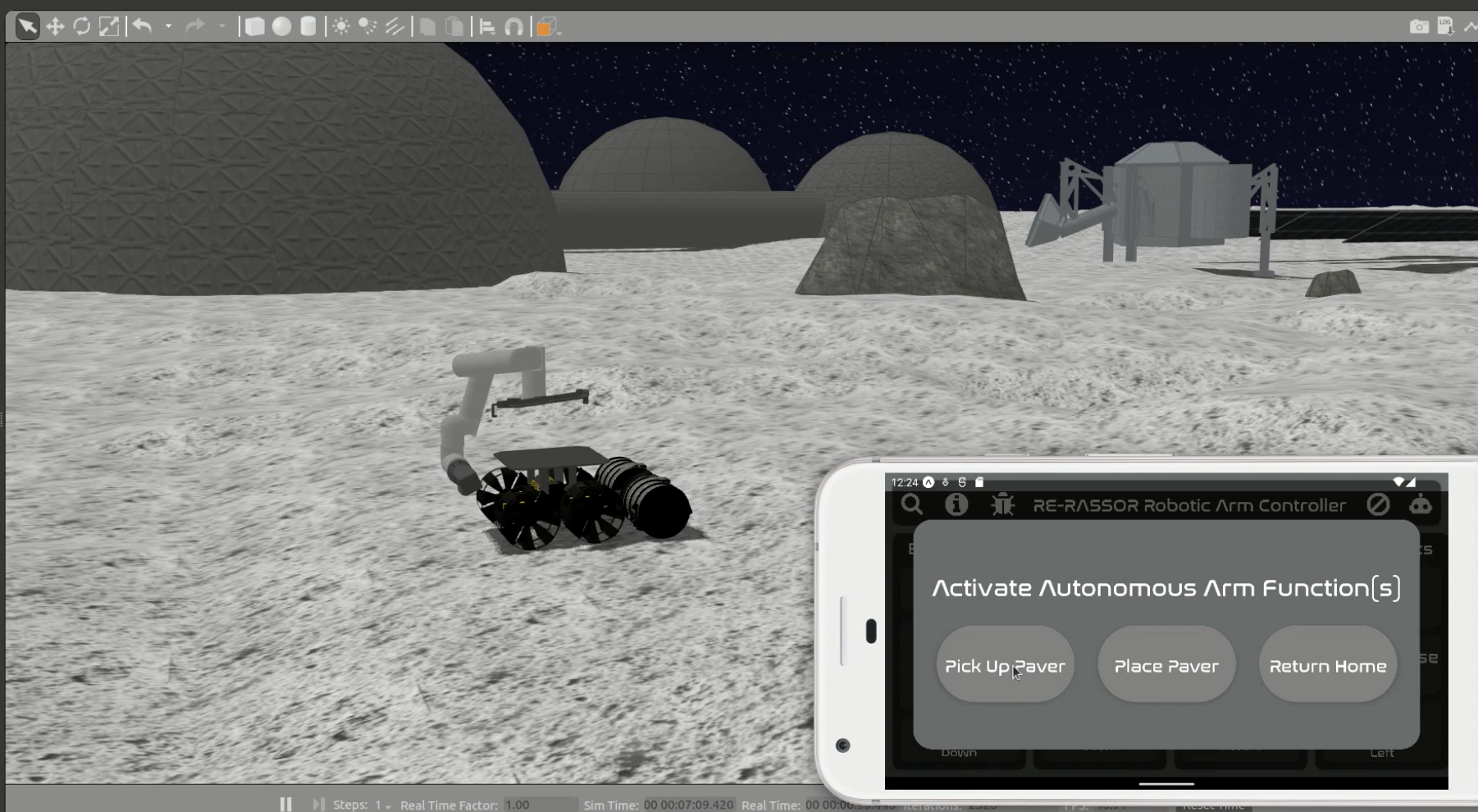
The RE-RASSOR Arm project integrated past arm software with the FSI provided Arm to provide arm movement and management software. The team combined created both the manual movement abilities as well as basic automatic functions for parking and homing the arm.
-
2022 RE-RASSOR Cart 1.0

The RE-RASSOR Cart project combined the ROS 1 and ROS 2 software with the current hardware design to create a turn-key rover for use in the classroom or to support research in the field. The host processor is a Raspberry Pi 4 that configures the Arduino controller, manages the remote-control interface (mobile device via wi-fi)…
-
2022 Sim Smackdown Lunar Base

The Sim SmackDown, or Simulation Exploration Experience, is a long running, international cooperative event combining Industry, Academia and Government to simulate future Lunar and Martian settlement concepts. NASA provides mentors, tools, architectures and challenges; Industry provides tools and standards; and Academia provides technologies and students from around the world. The UCF team is responsible for…
-
2021 Re-Rassor Software Competition
NASA created an indoor robotics arena for the their Lunabotics Competition. The desire was to run small rovers in smaller competitions for middle and high school students. The team ported the EZ-RASSOR software to the NASA hardware platform and developed competition management tools for use by the Education team. The Software was complete on time,…