
Showcase
FSI Student Design Projects cover a wide range of topics, disciplines and needs. Shared here are Reports, Papers, Posters, Other Products and the Teams.
Reports generally follow the FSI Capstone Format. The intent is synopsis of the project that will better enable sponsors, faculty and employers to understand the work performed and the capabilities of those involved. Papers, Posters and Other Products will likely be formatted as required for the target audiences.
-
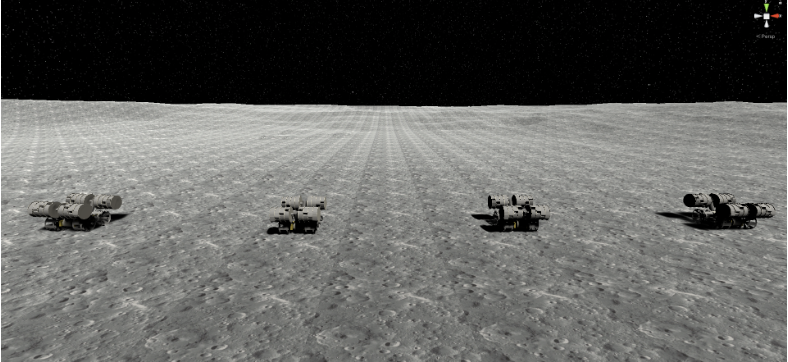
2021 Marsupial Rover

The Marsupial Rover is student developed and based on a NASA SwampWorks challenge. The goal is to leverage EZ-RASSOR software, NASA concepts, RE-RASSOR and Phoenix (small and large rovers) to create an autonomous resource harvesting system for the Moon or Mars.
-
2021 EZ-Rassor ROS 2.0 Migration
EZ-RASSOR is student developed, NASA Sponsored, open sources software for rover management and operation; details are available on the GitHub. The goal is to create a generalized rover management system suitable for remote control use, but extendable to autonomous navigation, swarm operation and local decision making. EZ-RASSOR began as a ROS 1.0 project. The 2021/22…
-
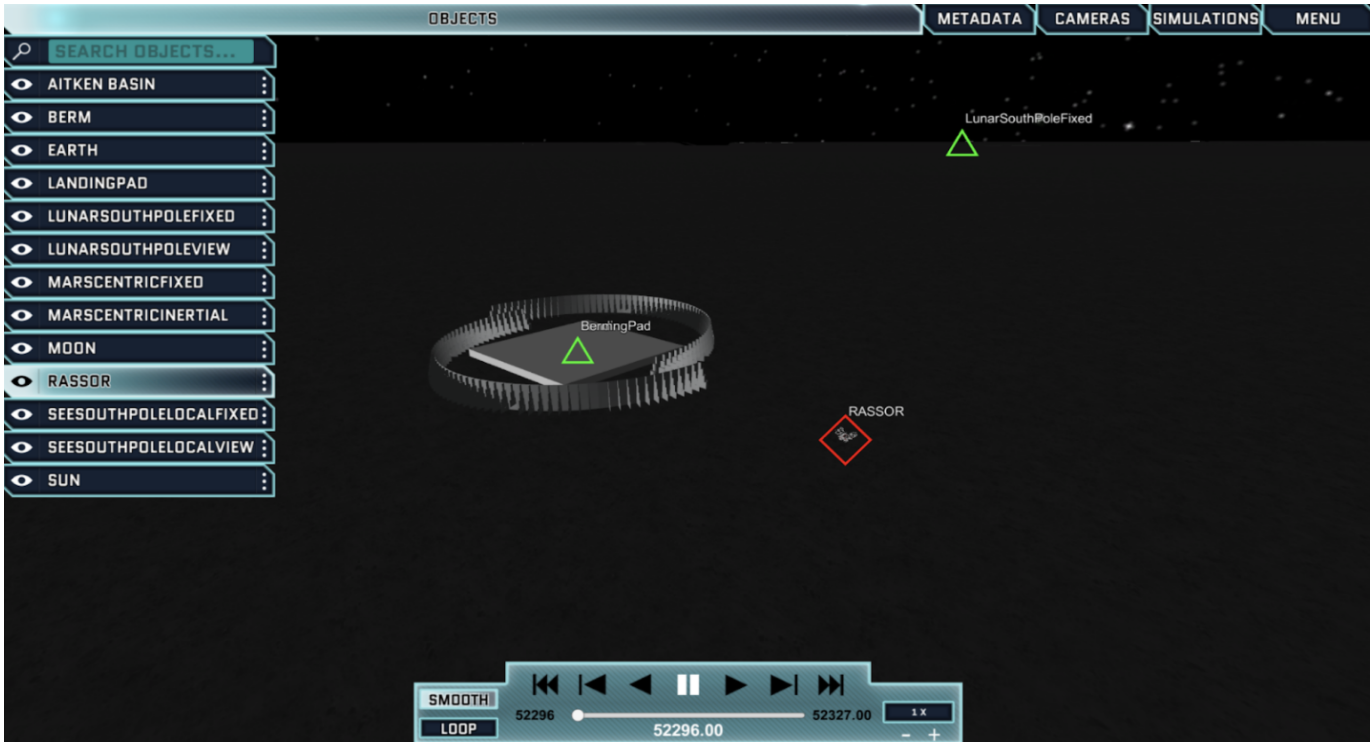
2021 Lunar ISRU Performance Model

The ISRU (In Situ Resource Utilization) Performance team created a discrete event simulation for lunar resources and the intended harvester and refinery systems. The simulation includes rover transit times, raw material locations, material characteristic (depth, % water, travel time) prospecting systems and beneficiation systems. This allows investigation of ISRU system performance and associated sensitivities to…
-
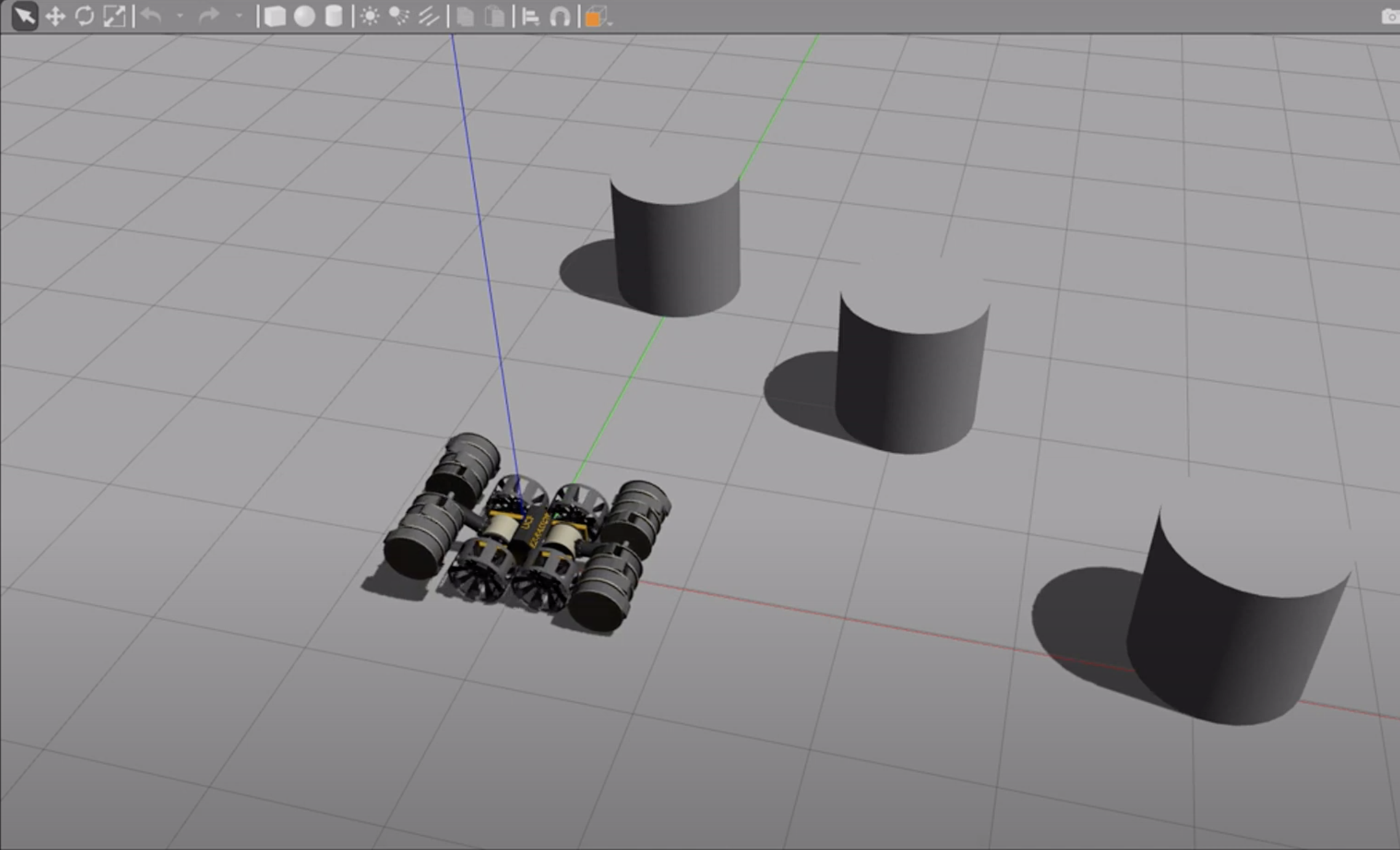
2021 Swarm Built Pad
The overall goal of our project is to level an area on the moon using a SWARM of EZ-RASSOR rovers so that a landing pad may be built. In doing this, we will illustrate that these low-cost rovers are to do high level tasks autonomously. Our project has several different aspects. We developed an algorithm…
-
2021 RE-RASSOR Arm Autonomous Operations
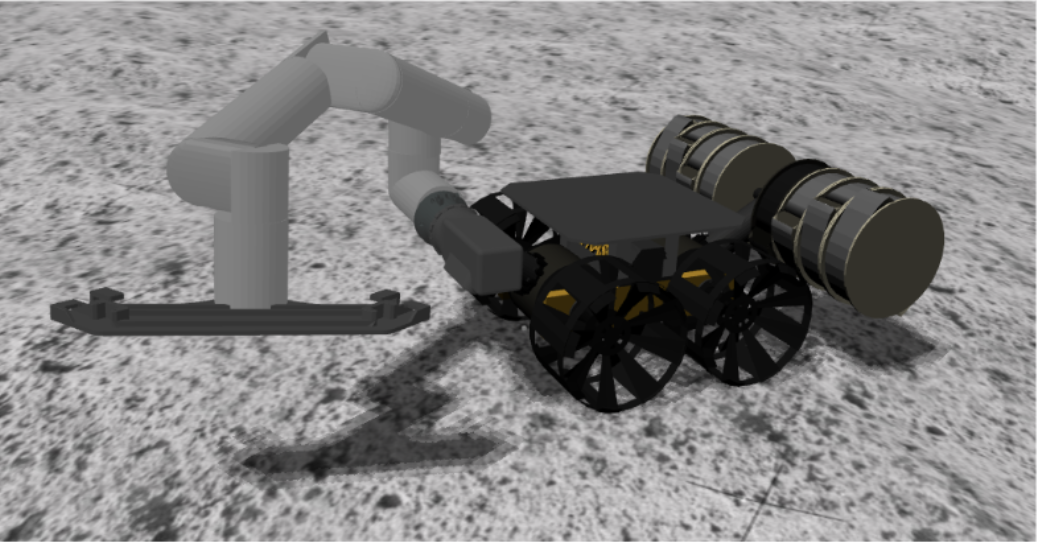
The goal of our project is to work with the Florida Space Institute (FSI) and their EZ-RASSOR rover simulation/RE-RASSOR real-world rover to integrate a robotic arm that will be used to place small rectangular bricks together to build infrastructure such as roads and landing pads on other planets/moons.
-
2021 Sim Smackdown
The Simulation Exploration Experience joins teams of students, faculty members, and industry advisors together for an annual international modeling and simulation conference that takes place in April.