What is RE-RASSOR?
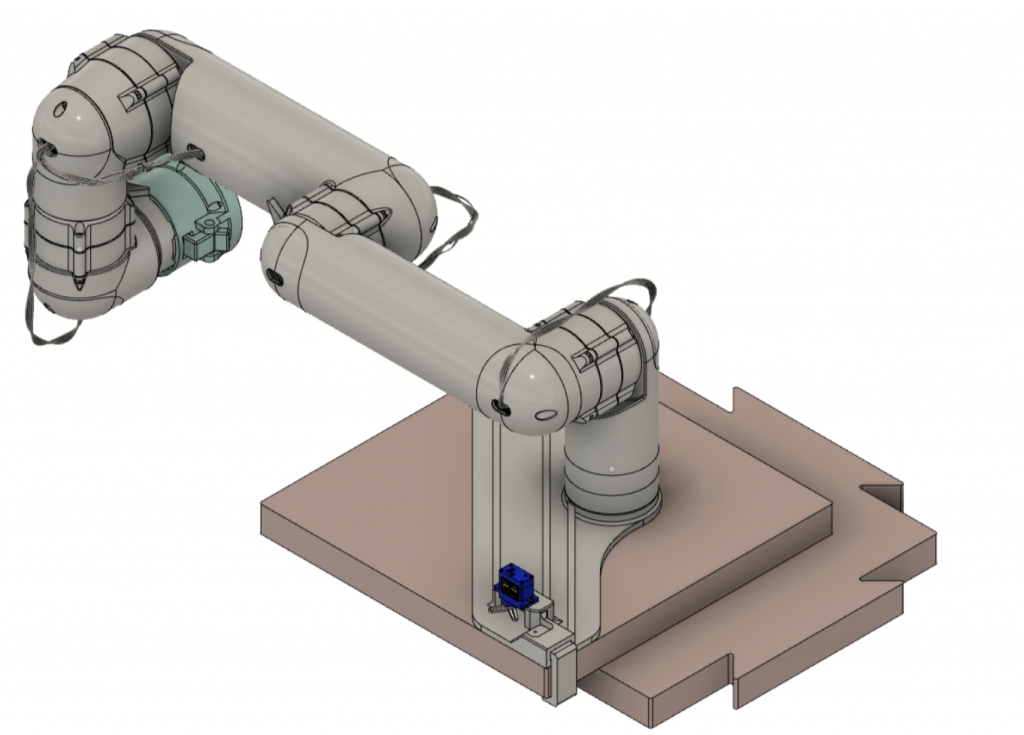
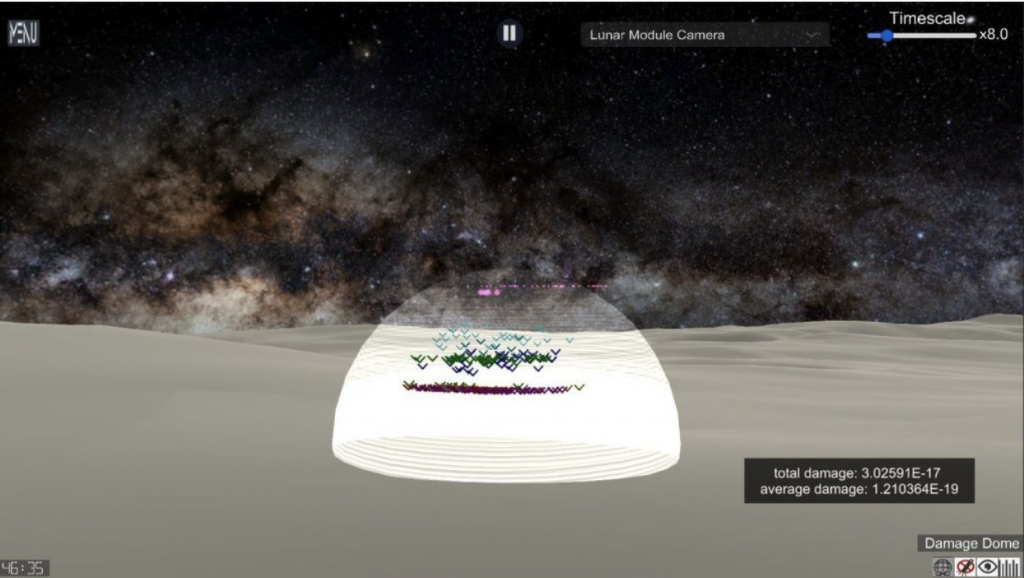
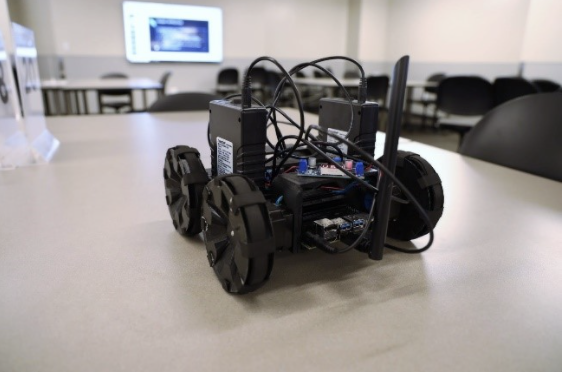
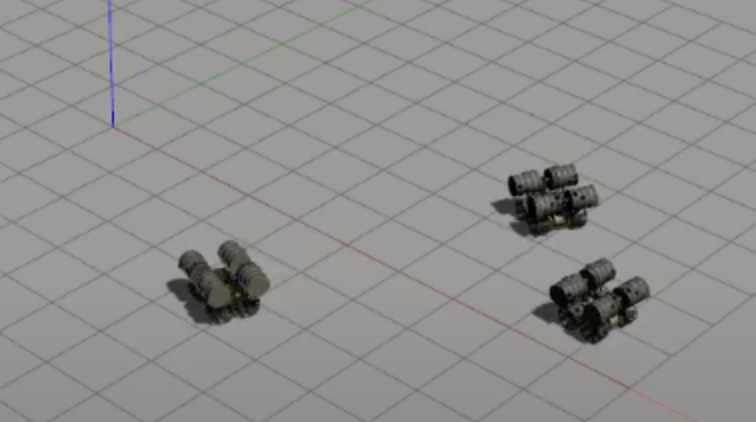
Research Education – Regolith Advanced Surface Systems Operations Robot, RE-RASSOR, is designed to emulate the RASSOR project that is under development at NASA’s development lab Swampworks. This project is being worked on by multiple teams of Computer Science students from University of Central Florida. The goal of the EZ-RASSOR project is to bring the technology being developed at Swampworks and make it open-sourced, so that anyone can view the code and contribute if they would like to. As well as to design a 3D-printable frame of the rover and select low-cost hardware parts for the physical rover. With these goals we are trying to make it so that if anyone would like to experiment with a rover of their own it would be a very easy and cheap processes to get started. Currently with the work of teams over multiple years we have designed a way to simulate a rover in multiple environments and gave the rovers path finding capabilities and obstacle detection. There is also an implementation of a swarm functionality so anyone can run test of multiple rovers performing tasks. For the physical rover there is currently 2 different types of 3D printable files that people can print out, with one being much larger to show what the actual rover looks like inside the simulation, and another being much smaller but able to demonstrate the rover’s pathfinding and obstacle detection in the real world. We are hoping that with this project that anyone who would like to experiment with rovers can do so very easily without worrying about where to get started.
The RE-RASSOR Project is a joint FSI, Florida Space Grant and NASA project to develop, mature and extend the EZ-RASSOR Software and the Mini-RASSOR Hardware. The goals include: ready to use rover systems and building blocks for Research projects; extensions and enhancements to those systems; and meaningful experiences and systems to support advance STEM / STEAM education. Production ready systems, components and open-source hardware and software are all to be available.
The Gold Team worked focused in the development of group management software for a set of autonomous RE-RASSOR robots. This leveraged the Black Team work on auto navigation and obstacle avoidance.

For getting started refer to the GitHub readme.
FlaSpaceInst/EZ-RASSOR: An inexpensive, autonomous, regolith-mining robot (github.com)
Project Sponsors
Florida Space Institute
Mike Conroy
Further Acknowledgements
Kurt W. Leucht
Ronald Marrero
Tiger Sachse
UCF Student Developers
Year 1:
Sean Rapp
Ron Marrero
Tiger Sachse
Tyler Duncan
Samuel Lewis
Harrison Black
Camilo Lozano
Chris Taliaferro
Cameron Taylor
Lucas Gonzalez
Year 2:
Black Team:
Jordan Albury
Shelby Basco
John Hacker
Michael Jimenez
Scott Scalera
Gold Team:
Daniel Silva
Chin Winn
Martin Power
Daniel Simoes
Autumn Esponda
Year 3:
Black Team:
Brandon Clark
Francis Fermo
Alexander Hillegass
Michaela Pinter
Conner Weik
Gold Team:
Jordan Carlton
Jeremy Dantes
Zachariah Tatman
Samuel Williams
Diego Zamora