SYSTEM DEVELOPMENT: ROBOTICS
The robotics division at Florida Space Institute is dedicated to designing and testing autonomous robotic systems for space exploration, ranging from planetary rovers to advanced robotic arms. Their strong connection to the broader scientific and engineering community is essential for fostering collaboration, sharing expertise, and advancing technological innovations that will drive the success of future space missions.
EXPLORE OUR ROVERS AND THEIR TECHNOLOGY
The Robotics Lab uses a range of specialized rovers designed for planetary exploration, capable of navigating diverse terrains, collecting scientific data, and performing tasks autonomously. These rovers are equipped with advanced sensors, cameras, and tools to conduct geological surveys, sample collection, and environmental analysis in challenging extraterrestrial environments.
Rovers come in all shapes and sizes, are crewed or un-crewed and include various levels of autonomy. Further, while a “flight like” robot may be capable of mission like tasks on Earth, significant progress can be made in the Research and Education space with robots that are significantly less robust at significantly less cost. To reduce the ambiguity with respect to rover “size” as well as “strength”; terminology was identified that addresses these domains with respect to the envisioned machines.

THE RE-RASSOR
RE-RASSOR (Research and Education – Regolith Advanced Surface Systems Operational Robot) is the initial FSI robotic offering. It combines the NASA Mini-RASSOR rover design (non-commercial license) with UCF Senior Design team developed EZ-RASSOR software to create a robust, 1R Class rover capable of Exploration Level tasks. The NASA design has been extended to include quick connect interfaces allowing rapid effector configuration for systems like the RE-RASSOR Bucket Drum.

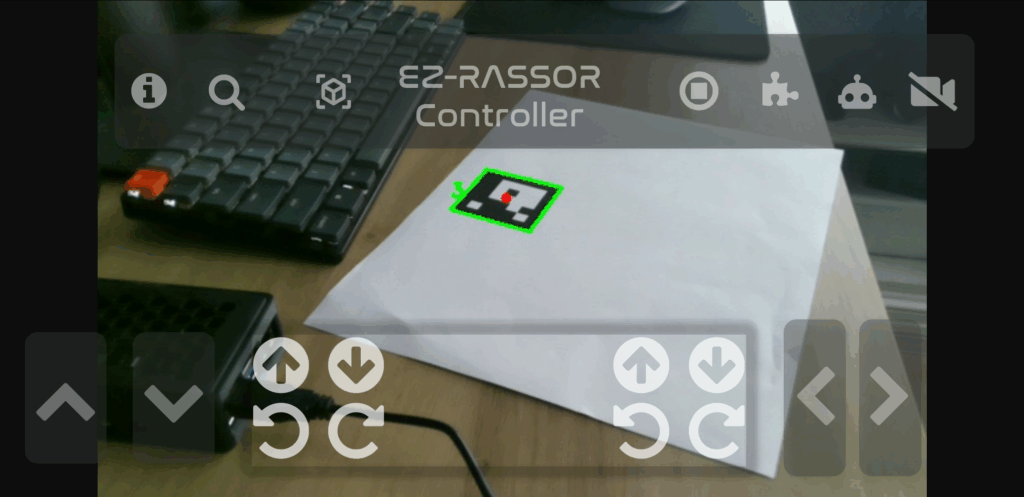
THE EZ-RASSOR SOFTWARE
EZ-RASSOR is a student-created, open-source suite of software for smaller, un-crewed rovers. Students continue development and support of EZ-RASSOR to enhance control functionality and integrate autonomy functions for navigation, operations and cooperation. EZ-RASSOR is the primary software platform supporting this vision. Senior Design students continue to improve and deliver an efficient easy to sustain platform for controlling these rovers.

THE STEAM EDUCATION RASSOR
NASA, Florida Space Grant and the Florida Space Institute; with several university senior design teams, developed a half meter, inexpensive, 3D printed, customizable robot based on NASA’s RASSOR (Regolith Advanced Surface Systems Operations Robot). The RE-RASSOR (Research and Education RASSOR) is licensed for non-commercial use, can easily be tailored to multiple needs and is suitable for a STEM Class or STEM Club project. This model is designed to be used by young students interested in robotics, reaching further into our community.
Here are some of the main components we test and measure with any of our rovers
STEADY TESTING OUTCOMES
DURABILITY AND STRENGTH
PERFORMED TARGET TASKS
ACCESSIBLE SOFTWARE


Download Version
Mark 1 – Rover

RE-RASSOR Mark 1 Rover: A four-wheel-drive rover equipped with cycloidal gearboxes that deliver high torque at low speeds. Powered by a Le Potato and Arduino, it’s designed to tackle challenging terrain while remaining easy to assemble.
The video shows a demo of a RASSOR in action
HELP US SUPPORT OUR RESEARCHERS IN THEIR PURSUITS
Support groundbreaking space exploration by contributing to the future of scientific discovery. Click here to help fund critical research and advance our understanding of the universe!