Organization
University of Central Florida — Computer Science
About
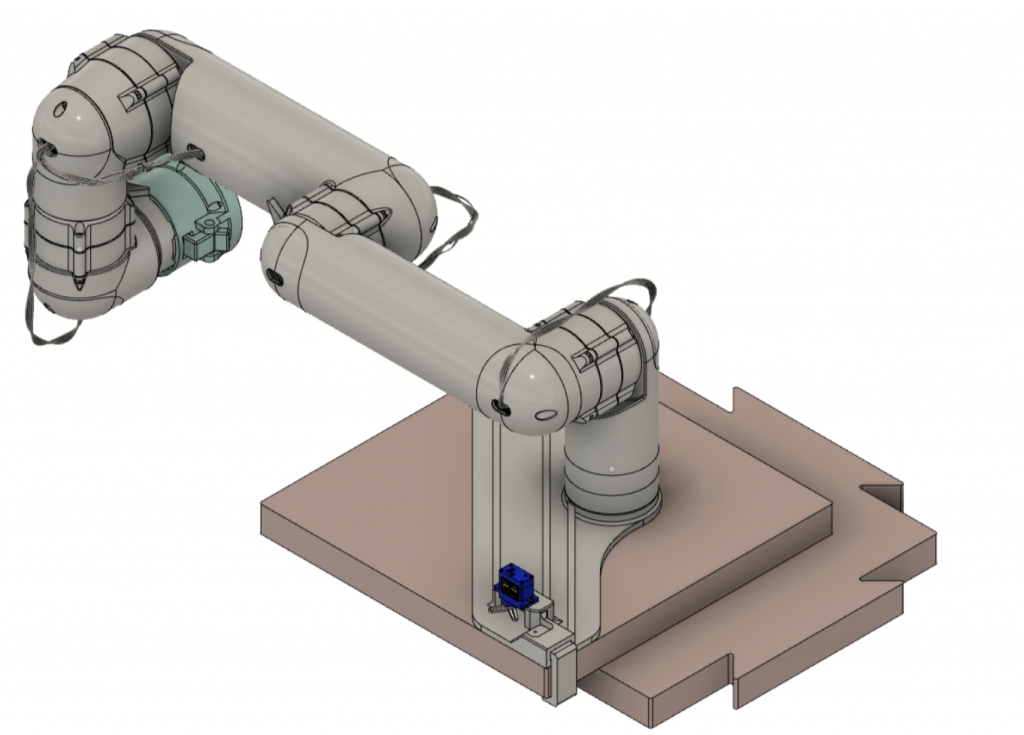
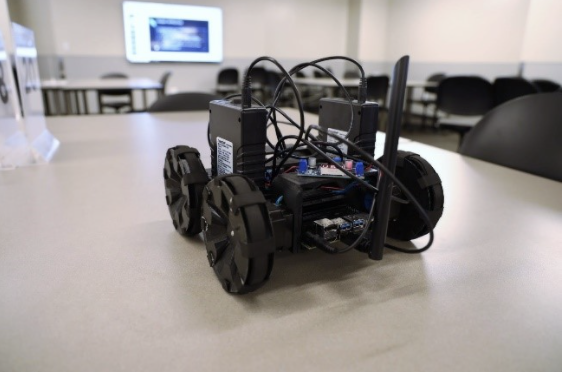
The RE-RASSOR Project is a joint FSI, Florida Space Grant and NASA project to develop, mature and extend the EZ-RASSOR Software and the Mini-RASSOR Hardware. Details are available on the Github. The goals include: ready to use rover systems and building blocks for Research projects; extensions and enhancements to those systems; and meaningful experiences and systems to support advance STEM / STEAM education. Production ready systems, components and open-source hardware and software are all to be available.
The ROS 2.0 migration team was required to take the ROS 1.0 system capabilities and move them to ROS 2.0. This was not a simple task for several reasons, some of which include: differences in the underlying software, the newness of ROS 2.0, incomplete features and the needs of the program.
Project Sponsor
Project Team
Swarm Control Team
Britney Baron
Matthew Gomez
Autonomous Control Team
Nathan Kurelo Wilk
Mauricio Costa
Project Manager
Alexander Cingoranelli